5s
+1
Submission successful!




روش خنک کننده: خنک کننده هوا
طبقه بندی درجه ها: IP54
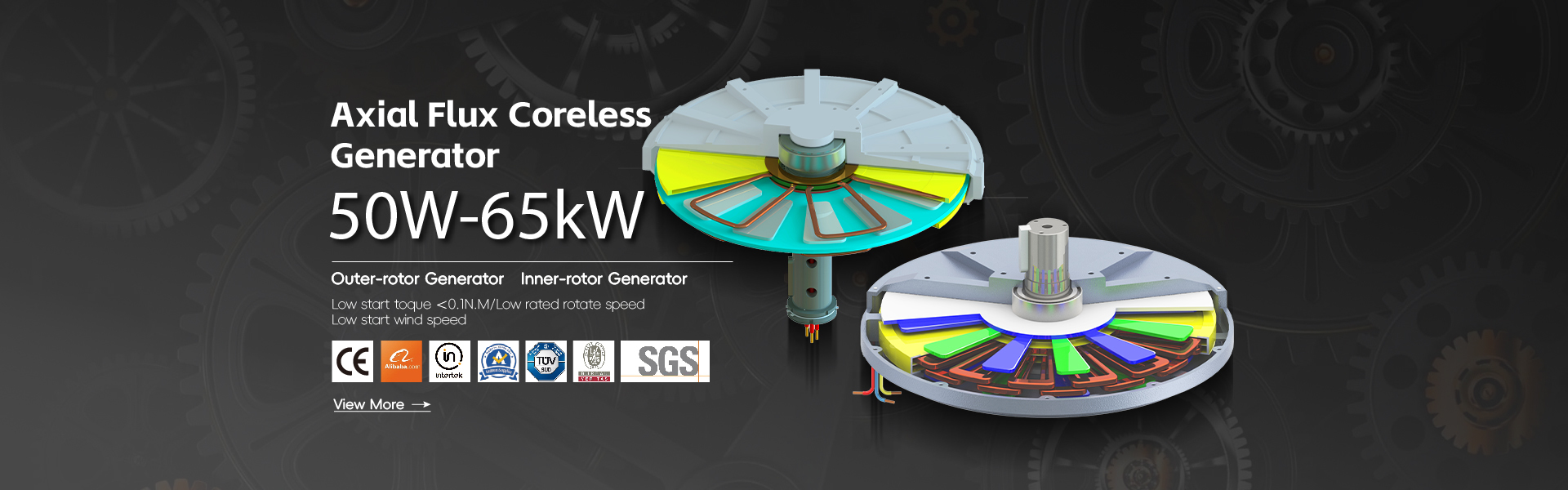
قدرت نامی: 10 کیلو وات
جنس تیغه: آلیاژ آلومینیوم
نوع: ژنراتور برق بادی
قدرت نامی: 300w-30kw
گشتاور را شروع کنید: <0.3N.M
ولتاژ کاری نامی: DC400V/DC240V
سرعت نامی باد: 11.5 M/s
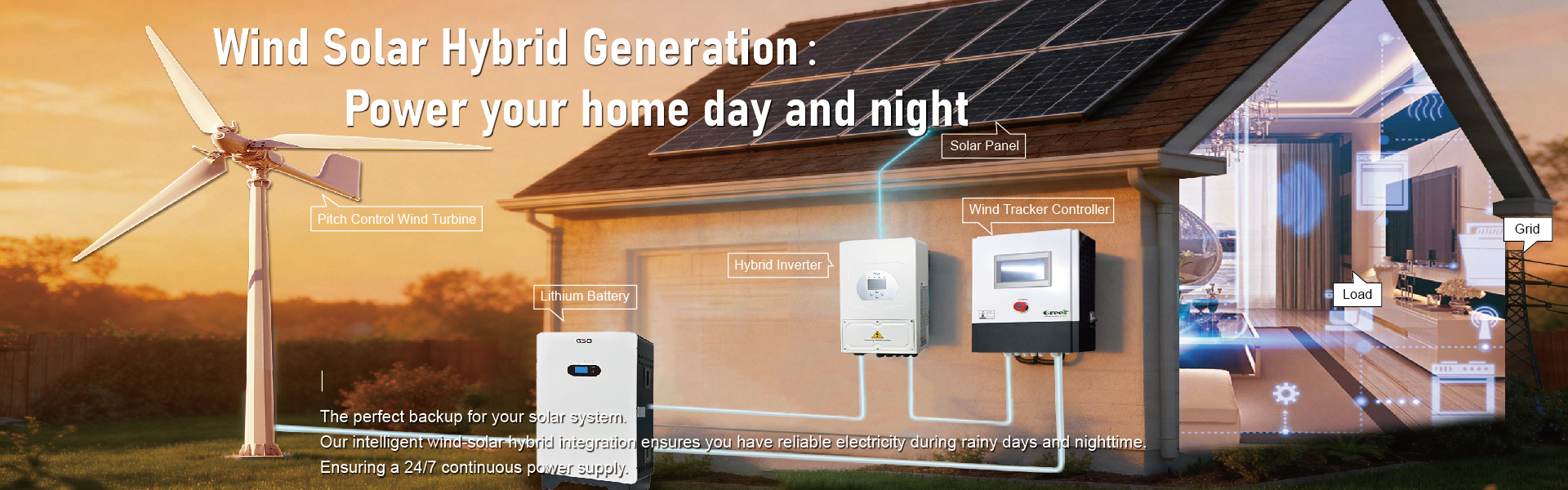
نام محصول: مبدل هیبریدی
توان نامی (KW): 100kw/150kw/200kw/250kw/300kw/500kw/600kw/700kw/800kw/1000kw
فرکانس خروجی: 50 هرتز / 60 هرتز


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


